СЫ„УјјРgФЪй_°lТ»·N»щУЪСЫ„УЧ·ЫҷөД·ЗЗЦИлКҪҷCРөұЫҝШЦЖПөҪyөД‘ӘУГ

ХӘТӘЈә
УРҮАЦШХZСФәНЯ\„УХПөKөДИЛЈ¬УЙУЪҹo·ЁУРР§өДҝШЦЖјЎИвөДТЖ„УЈ¬ҝЙДЬҙжФЪЕcНвІҝКАҪзңПНЁА§лyөДЗйӣrЎЈФЪұҫСРҫҝЦРЈ¬ОТӮғй_°lБЛТ»·N»щУЪСЫ„УЧ·ЫҷөД·ЗЗЦИлКҪҷCРөұЫҝШЦЖПөҪyЎЈФЪід·Цҝј‘]ҷCРөұЫөДҝХйgМШРФәуЈ¬ОТӮғЯMРРБЛТФУГ‘фһйЦРРДөДФOУӢЯ^іМЈ¬ЖдЦР°ьә¬°ЛӮҖГьБоәНТ»ӮҖЦРйgҢҚ•rТ•оlӮчЭ”УГ‘фҪзГжЎЈҙЛНвЈ¬ОТӮғФu№АБЛИэ·NСЫ„УЧўТ•ьcМҺАнЛг·ЁЎЈЖдЦРЈ¬»щУЪГЬ¶ИөДҝХйgҫЫоҗәНФлВ•Лг·ЁөДЖҪҫщңКҙ_ВКЯ_өҪБЛ 99.3%ЎЈФЪҙЛ»щөAЙПЈ¬ОТӮғФOУӢІўЯMРРБЛлxҫҖҢҚтһЈ¬5Гыұ»ФҮ¶јДЬүт°lЛНңКҙ_ВКёЯУЪ 99% өДГьБоЎЈ
ҢҚтһ·¶КҪ
AЎў УІјюұҫСРҫҝЦРК№УГөДҷCРөұЫҝШЦЖПөҪy°ьАЁҷCЖчИЛКЦұЫЎўСЫ„УЧ·ЫҷФOӮдәНУГ‘фҪзГжЎЈ
ұҫСРҫҝЦРөДСЫ„УЧ·ЫҷФOӮдКЗК№УГSR Research№«ЛҫЙъ®aөДEyeLink 1000 PlusСЫ„УЧ·ЫҷФOӮдЈ¬Ф“ФOӮдҫЯУРЈәёЯІЙҳУВК2000 HzЎЈ
myCobot БщЭS…fЧчҷCЖчИЛұҫҢҚтһҷCЖчИЛК№УГөДКЗ…fЧчҷCЖчИЛКЦұЫЈ¬Ф“ПөҪyКЗТ»ӮҖ¶а№ҰДЬЎўЭpБҝјүөДЦЗДЬҷCЖчИЛЎЈУЙЦРҮшҙуПуҷCЖчИЛ№«Лҫй_°lЈ¬ҫЯУРШSё»өДУІјюәНЬӣјюҪ»»ҘәН¶а·NјжИЭРФЎЈҷCЖчИЛУРР§Ц§іЦ¶аЖҪЕ_¶юҙОй_°lҺНЦъУГ‘фЯMРР¶аҲцҫ°й_°lЎЈ

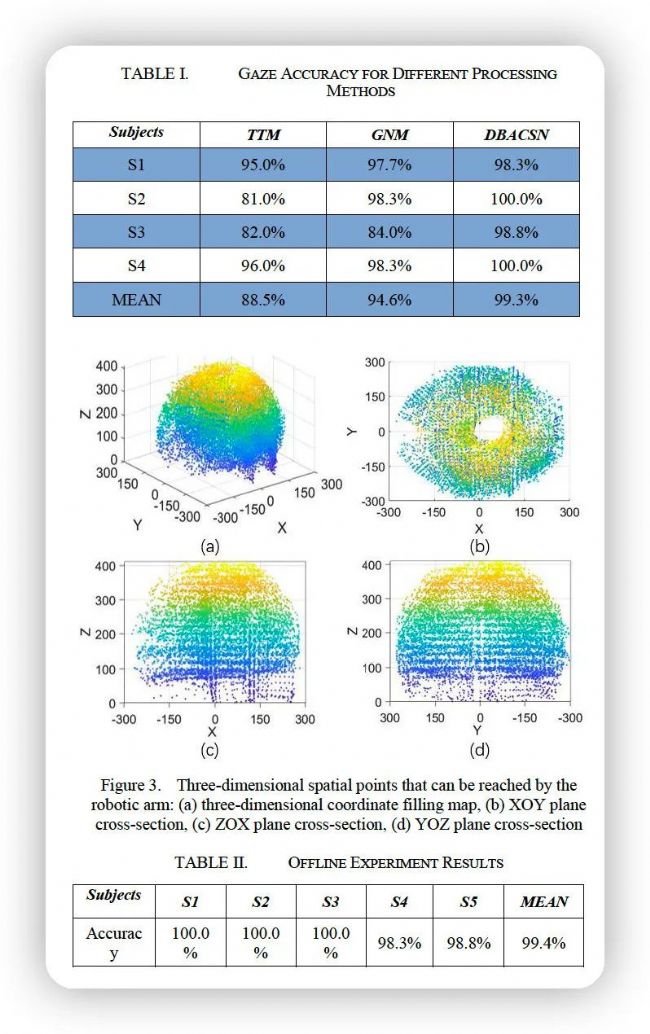
BЎў УГ‘фҪзГжФOУӢҢҚтһөДҙМјӨҪзГж°ьАЁ°ЛӮҖҫШРОҝтәНҢҚ•r”zПсҷCөДӮчЭ”ЖБД»№ІУРҫЕӮҖ…^УтЎЈФЪҫЕӮҖ…^УтЦРЈ¬О»УЪЧуЙПҪЗәНУТПВҪЗҳЛУӣһйЧҘЧЎ/бҢ·ЕҳЛәһЈ¬УГУЪҝШЦЖҷCЖчИЛКЦұЫХ№й_ЎЈЖдЛьБщӮҖҳЛәһұ»ҳЛУӣһйПтЙПЎўПтЗ°ЎўПтЧуЎўПтУТЎўПтәуәНПтПВЎЈЯ@БщӮҖҫШРОҝтұнКҫБщӮҖҷCРөұЫТЖ„У·ҪПтЈәПтЙПЎўПтЗ°ЎўПтәуЈ¬ПтЧуЎўПтУТЎўПтПВЎЈ
CЎў іМРтұҫСРҫҝөДлxҫҖҢҚтһБчіМФOУӢһйЈә»щУЪіхІҪҢҚтһөДҪY№ыЎЈұ»ФҮКЧПИВ өҪ0.5ГлөДВ•ҙМјӨЎЈИ»әуЈ¬һйБЛҙ_ұЈҢҚтһөДлSҷCРФЈ¬УГ‘фҪзГжЙПөД°ЛӮҖҫШРОГьБоҝтлSҷCіц¬FТ»ӮҖјtЙ«·ҪҝтЈ¬ТФМбРСұ»ФҮЈ¬іЦАm2ГлЎЈН¬•rЈ¬ФҮҙОйgёфТІКЗ2ГлЎЈТ»№ІЯMРР10ҙОЈ¬ёщ“юлxҫҖҢҚтһБчіМЈ¬ұ»ФҮЧціцЯx“сЈ¬ІўУӢЛгЖдңКҙ_¶ИЎЈ

”ө“юМҺАнәН·ЦОц
AЎў СЫ„УРЕМ–МҺАнК№УГMATLAB 2020ҢўEDFёсКҪЮD“QһйҝЙұ»ЧR„eөДMATёсКҪЎЈ
BЎў Ҫ№ьc·ЦОцһйБЛ«@өГёьёЯөДЧўТ•ҫ«¶ИЈ¬ОТӮғЯMРРБЛоAҢҚтһЎЈК№УГИэ·N·Ҫ·ЁЈәй“Цө·ЁЈЁTTMЈ©Ј¬ёЯЛ№ҡwТ»»Ҝ·Ҫ·ЁЈЁGNMЈ©әН»щУЪГЬ¶ИөДҫЫоҗУГУЪМҺАнұ»ФҮөДЧўТ•ьc”ө“юөДЛг·ЁЎЈ
CЎў ҷCРөұЫөДЦЗДЬТҺ„қІЙУГЦЗДЬТҺ„қЛг·ЁҝШЦЖҷCРөұЫД©¶ЛҲМРРЖчТФЦё¶ЁөДЧЛ‘BТЖ„УөҪЦё¶ЁьcЎЈ
ҪY№ыЈә
ҪYХ“Јә
ұҫСРҫҝй_°lБЛТ»·N»щУЪСЫ„УёъЫҷҝШЦЖөДҷCРөұЫҝШЦЖПөҪyЈ¬ТФҺНЦъУРЯ\„УХПөKөДИЛЯMРРҝөҸН»тҲМРРИХіЈИО„ХЎЈОТӮғКЧПИК№УГҷCРөұЫВ·ҸҪЦЗДЬТҺ„қЛг·Ё«@өГИэҫSҝХйg”ө“юЈ¬И»әу”MәПҷCРөұЫөД№ӨЧчГӨ…^ЎЈІўұИЭ^БЛИэ·N№АУӢУГ‘фЧўТ•ьcөДЛг·ЁЈ¬ІўФЪоAҢҚтһЦРұИЭ^БЛЛьӮғөДРФДЬЎЈФЪлxҫҖҢҚтһЦРЈ¬ОТӮғ»щУЪDBSCANЛг·ЁФOУӢБЛТ»ӮҖҫЯУР°ЛӮҖГьБоәНҢҚ•rТ•оl»Ш·ЕөДGUIЈ¬ТФҝШЦЖҷCЖчИЛКЦұЫНкіЙК°ИЎәН·ЕЦГИО„ХЎЈОТӮғҢҰҲDРОУГ‘фҪзГжөД„“РВФOУӢТФј°DBSACANЛг·ЁөДФu№АәНК№УГёДЙЖБЛИЛСЫЧ·ЫҷЦРөДИЛҷCҪ»»ҘА§ҫіЎЈ
ұҫОДғHЧцҢWБ•·ЦПнК№УГЈ¬ИфУРТЙҶ–ј°ЗЦҷаЈ¬ХҲәуЕ_В“ПөОТӮғЈЎ

- ҪӣқъёЯР§өДСЫ„У·ЦОц№ӨҫЯEyeReaderөД№ӨЧчФӯАнј°ғһ„ЭҪйҪB
- ҸДFaceReaderөҪAIЈәКіЖ·ёР№ЩСРҫҝөДОҙҒн
- FaceReaderРВЙэјүәуөД7—lК№УГЦёДПҪйҪB
- І©Опр^й“ПЮҝХйgҪЁЦюМШХчҢҰ…ўУ^ХЯЗйёРЕcЙз•ю»Ҙ„УУ°н‘СРҫҝ
- »щУЪРРһйУ^ІмөДҫУГсЙъ»оҝХйgФOУӢ¶ҙІм
- ¶а№вЧУп@ОўјјРgУГУЪҝЙТ•»ҜМҪЛчДXДӨБцОўӯhҫі
- ЖӨДwлҠ·ҙ‘ӘөДәҶҪйј°ЖдФЪРРһйСРҫҝЦРөД‘ӘУГ
- ГжІҝұнЗй·ЦОцПөҪyЦъБҰҫҖЙПРДАнЧЙФғҺҹГжІҝұнЗйҢҰҒнФLХЯУЎПуУ°н‘өДСРҫҝ
- ЦZЯ_ЛјИОГьJay de GrootһйРВИОКЧПҜҲМРР№Щ
- СРУ‘•юЈәDikablis Glasses Xо^ҙчКҪСЫ„Уғx°lІј•ю
- Lucas Noldusҳs«@2025КЧҸҲGlobal ScholarЧC•ш
- ЦZЯ_Лј…ўХ№2024Дк№ӨіМРДАнҢWҢЈОҜ•юҢWРgДк•ю
- ЦZЯ_ЛјіЙ№Ұ…ўХ№ҢҺІЁөЪК®¶юҢГЦРҮшУГ‘фуwтһҙу•ю
- Ҫт°lҝЖјјИлЯxЎ°2024ДкИ«ҮшУГ‘фуwтһ„“РВөдРН°ёАэЎұ
- Ҫт°lҝЖјјИлЯx№ӨҳIәНРЕПў»ҜІҝТ•В УСәГ№ӨЧчҪMіЙҶTҶОО»
- ЦZЯ_Лј…ўХ№ЙсҪӣҪӣқъ№ЬАнЕc№ӨіМҢWРgЗ°СШ•юЧh